
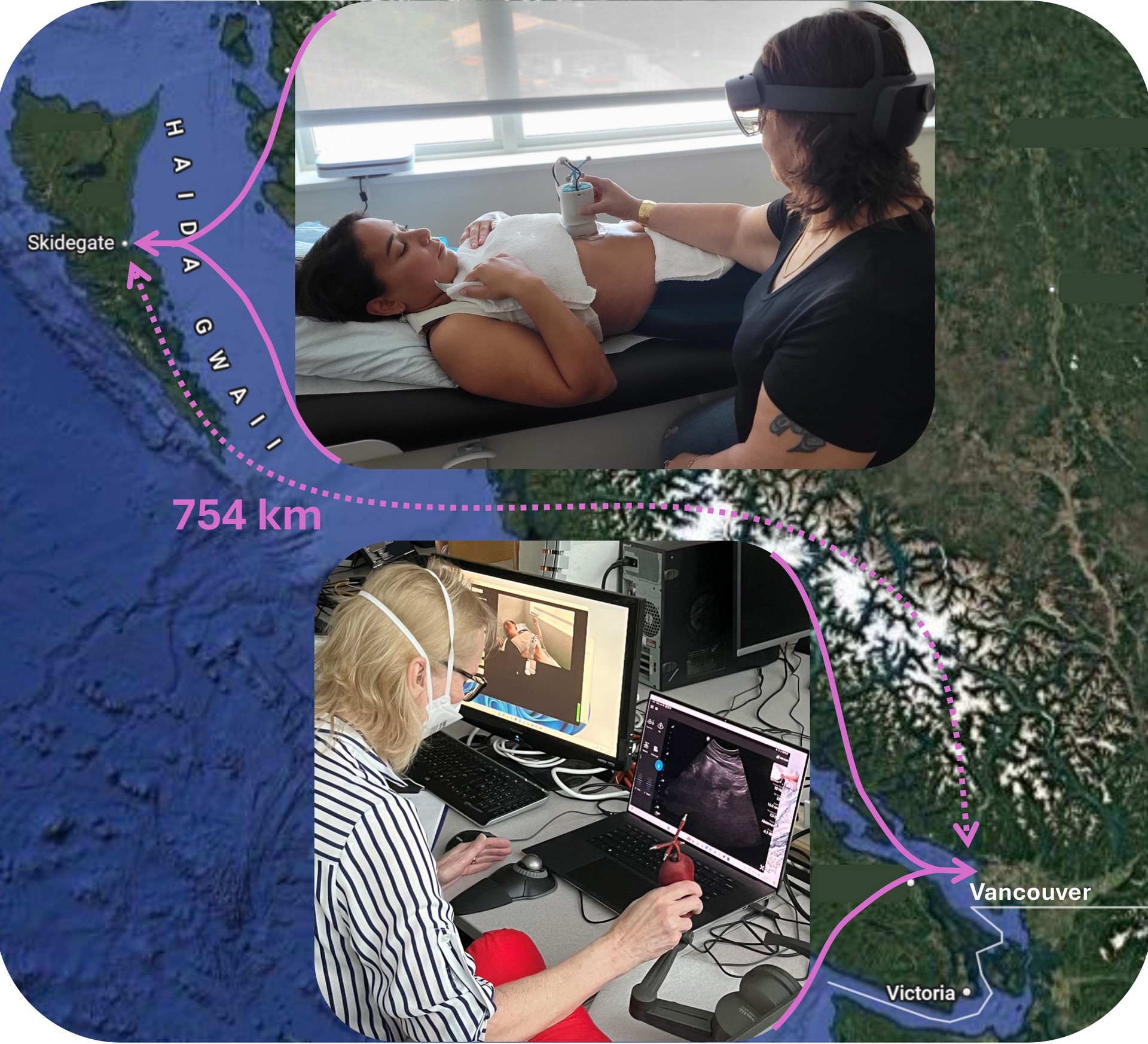
Bring expert knowledge and experience anywhere, anytime through accessible, low-cost, but precise and efficient teleguidance of ultrasound examinations.







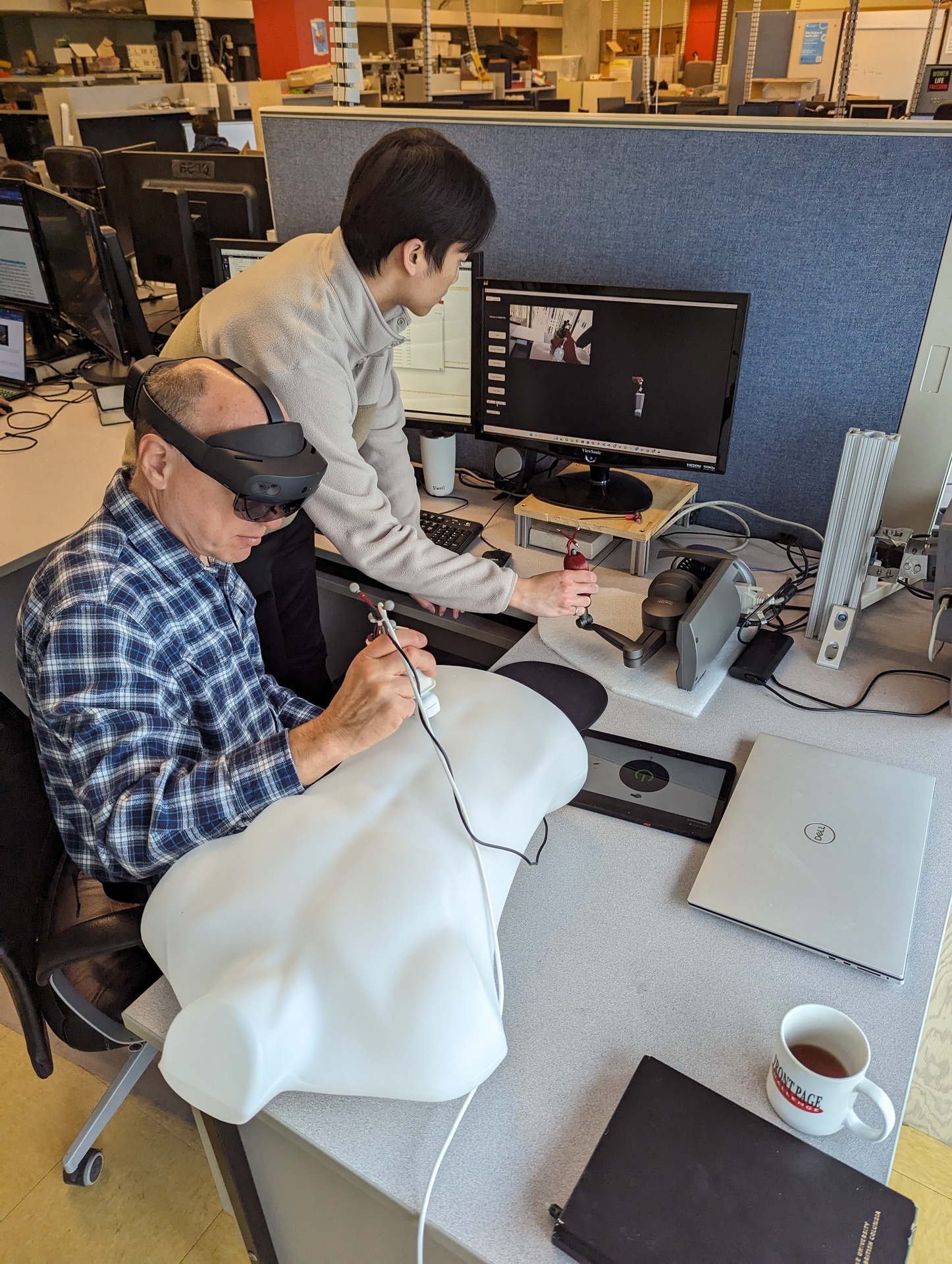
Bring expert healthcare to any location, any time through Mixed Reality Human Teleoperation.
Reduce travel, wait times, time away from work and family, CO2 emissions, and the cost of healthcare.
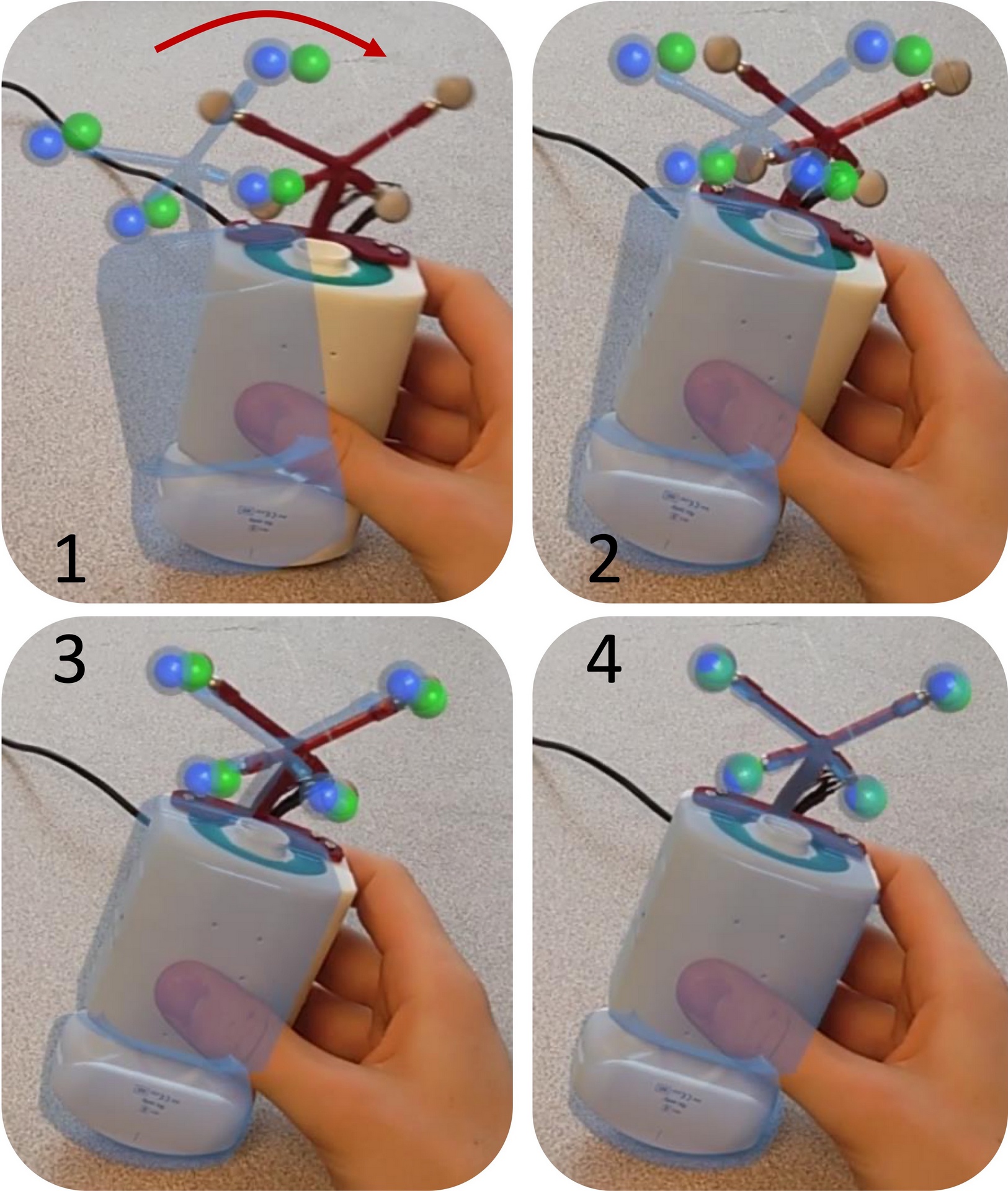
Operable with no prior experience, Human Teleop eliminates the need for complex, expensive, large robots


















For questions, potential partnerships, and community, hospital, technical, industrial, research, or other collaborations, please get in touch!